Vol
du drone Ingenuity sur Mars,
bac Centres étrangers 2024
En
poursuivant votre navigation sur ce site, vous acceptez l’utilisation
de Cookies vous proposant des publicités adaptées à vos centres
d’intérêts.
.
| . |
.
.
|
|
.
.
|
..
..
......
...
|
Le
rover Perseverance actuellement en mission sur la planète Mars a
embarqué avec lui un autre robot : Ingenuity, un petit drone destiné à
voler sur Mars. Les missions d’Ingenuity sont multiples :
reconnaissance optique du terrain, étude des communications dans
l’atmosphère ténue de Mars et surtout le premier test de vol motorisé
sur une autre planète.
Masse du drone : m = 1,8 kg ;
Valeur de l’accélération de la pesanteur terrestre : gTerre = 9,8 m·s-2 ;
Valeur de l’accélération de la pesanteur sur Mars : gMars = 3,7 m·s-2.
Lors de ses missions, la valeur de la vitesse maximale atteinte par Ingenuity est v0 = 6,0 m.s-1 et l’altitude maximale atteinte reste inférieure à 15 m.
La phase la plus délicate du vol du drone est sa fin, le choc avec le
sol. La solution retenue pour éviter de détériorer le drone est
d'arrêter la propulsion à un mètre au-dessus du sol et de laisser le
drone atteindre le sol en chute libre. On considère, le sol de Mars
étant sablonneux, que le drone s’arrête brutalement quand il touche le
sol, aussi bien dans son mouvement vertical qu’horizontal.
Le train d’atterrissage a été conçu pour supporter une certaine vitesse maximale à l’arrivée sur le sol sans détruire l’engin.
Le but de l’exercice est d’étudier le mouvement du centre de masse du
drone en chute libre, lors de la dernière phase du vol à partir d’un
mètre au-dessus du sol et de déterminer la valeur de la vitesse
atteinte lors de l’impact avec le sol, puis de comparer ce mouvement
avec celui qui serait réalisé sur Terre dans les mêmes conditions.
On associe au référentiel de la planète Mars un repère d’espace schématisé sur la figure ci-après.
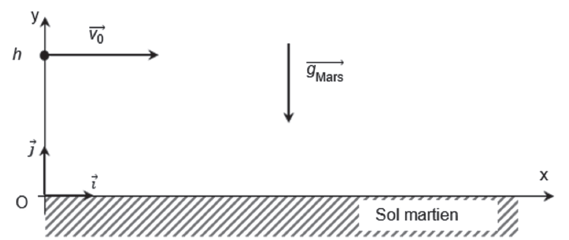
On considère que la vitesse du drone au moment de l’arrêt de la propulsion est horizontale et de valeur v0 = 6,0 m·s-1 ; le drone se trouve à cet instant à une altitude notée h.
Q1. Rappeler la définition du modèle de la chute libre.
Un corps en chute libre n'est soumis qu'à son poids.
Q2. Prévoir sans
calcul, lors d’une chute libre sans vitesse initiale et pour une même
hauteur initiale, laquelle des situations (sur Terre ou sur Mars)
serait la plus contraignante du point de vue de la solidité du train
d’atterrissage.
Energie mécanique du système : sur terre mgTerre h ; sur Mars mgMars h ;
gTerre > gMars
; l'énergie mécanique est la plus importante sur Terre et la situation
d'un atterrissage sur Terre sera plus contraignante pour le train
d'atterissage.
Q3.
Après avoir effectué un bilan des forces appliquées au drone dans le
cadre du modèle de la chute libre, donner l’expression du vecteur
accélération du drone ainsi que les coordonnées de ce vecteur
dans le repère.
Le drone n'étant soumis qu'à son poids, le vecteur accélération est vertical vers le bas, de norme -g Mars.
La vitesse du drone au moment de l’arrêt de la propulsion, choisi comme origine des temps t = 0, est horizontale et de valeur v0 = 6,0 m·s-1 ; le drone se trouve à cet instant à une altitude notée h = 1,0 m.
Q4. Déduire de la
question 3 les coordonnées du vecteur vitesse dans le repère au cours
du temps. Qualifier le mouvement horizontal du drone avant impact et en
déduire la valeur de la vitesse horizontale du drone lorsqu’il touche
le sol.
La vitesse est une primitive de l'accélération :
vx = v0. vy =-gMars t.
Le mouvement du drone selon l'horizontale est rectiligne uniforme.
La valeur de la vitesse horizontale du drone lorsqu’il touche le sol est v0 = 6,0 m /s..
Les équations horaires du mouvement lors de la chute ont pour expression :
x(t) = v0 × t et y(t) = -½gMars t2 +h.
Q5. Exprimer la date timpact à laquelle le drone touche le sol en fonction de h et gMars.
0 = -½gMars t2 +h ; t = (2h /gMars) ½= (2 x1,0 / 3,7)½ =0,735 ~0,74 s.
Q6. Calculer la valeur de la position horizontale de l’impact du drone sur le sol martien ximpact.
ximpact = 6,0 x0,735 =4,4 m.
Calculer la valeur de cette position si l’expérience se faisait dans les mêmes conditions sur Terre.
t = (2h /gTerre) ½= (2 x1,0 / 9,8)½ =0,45 s.
ximpact = 6,0 x0,45 =2,7 m.
Q7.
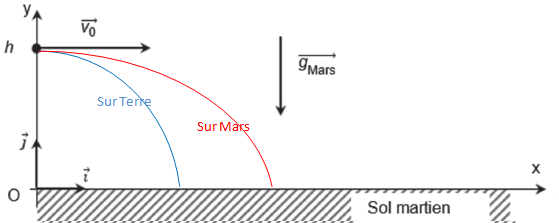
Tracer sans souci d’échelle sur un schéma identique à celui de la
figure, l’allure de la trajectoire du drone entre l’instant t = 0 et
l’instant où il touche le sol sur Mars. Tracer sur le même schéma
l’allure de la trajectoire du même drone, dans les mêmes conditions
initiales, si cette chute s’effectuait sur Terre. On distinguera
clairement les deux courbes (légendes, couleurs, etc).
Q8. Vérifier que la valeur de la vitesse du drone, lorsqu’il touche le sol de la Terre, est d’environ 7,5 m·s-1. En déduire la valeur de son énergie cinétique Ec.
v= (v02 + vy2)½ = (v02 + (gTerre t.)2)½ =(62 + (9,8 *0,45.)2)½ ~7,5 m s-1.
Ec = 0,5 x1,8 x7,52 =51 J.
Q9.
Prévoir si un drone capable de résister à un choc avec cette valeur de
Ec sur Terre, pourra subir sans dommage un choc dans les mêmes
conditions initiales sur Mars.
Sur Mars : v= (v02 + vy2)½ = (v02 + (gMars t.)2)½ =(62 + (3,7 *0,74)2)½ ~6,6 m s-1.
Ec = 0,5 x1,8 x6,62 =39 J.
Le choc sur Mars est moins violent que sur Terre. Le drone ne subira pas de dommage.
|