Le viscosimètre à chute de bille. 4
points
La viscosité d’une huile, notée
h, est un paramètre exprimé
en kg m
-1 s
-1
, dont la
connaissance est essentielle pour toute utilisation de cette huile.
Cet exercice propose un exemple de méthode de mesure de la valeur de la
viscosité
d’une huile de moteur Diesel du commerce.
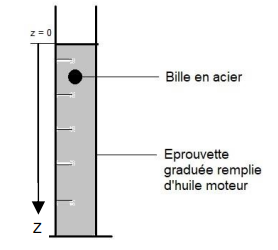
Pour réaliser cette mesure, on utilise un « viscosimètre à chute de
bille », constitué
d’une éprouvette remplie d’huile de moteur dans laquelle est lâchée une
bille
métallique sphérique.
On se place dans le référentiel terrestre supposé galiléen et la bille
est lâchée sans
vitesse initiale depuis la position z = 0.
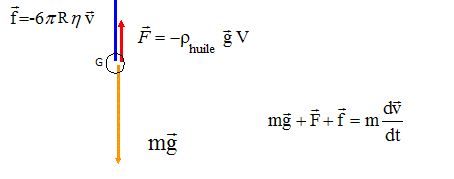
Les forces exercées sur la bille métallique sont :
- Le poids P
=mg avec m =20,1 g.
- La poussée d’Archimède, notée P
a , de même direction que
le poids P et de sens
opposé. Sa valeur est P
a =
rhuile V g, où
rhuile =840 kg m
-3
est la masse volumique de l’huile, V=5,6 10
-6 m
3
le volume de la bille.
- La force de frottement fluide exercée par l’huile sur la bille est
notée f . Elle est ici de
même direction que le poids P et de sens opposé. Sa valeur est donnée
par la relation f = 6
p
h R v,
où v est la valeur de la vitesse de la bille,
h est la viscosité de
l’huile et R
=1,1 cm le rayon de la bille.
Q1. Faire un schéma
des forces s’appliquant sur la bille.
Exprimer le poids de la bille en fonction de m et m puis calculer sa
valeur.
Calculer de même la valeur de la poussée d’Archimède P
a et
justifier que la bille d’acier
tombe dans l’huile quand on la lâche en 𝑧 = 0 avec une vitesse
initiale nulle.
Q2. En utilisant le principe
fondamental de la dynamique, établir la relation liant le
vecteur accélération , les forces s’exerçant sur la bille et la masse m
de
cette bille.
P = mg = 20,1 10
-3 x9,81 =0,197 N.
P
a = 840 x5,6 10
-6 x9,81 =0,046 N.
Initialement la force de frottement fluide est nulle ; de plus P > P
a
: la bille tombe.
Q3. On note v la fonction
définie sur [0 ; +∞[ comme la projection du vecteur vitesse v sur l’axe
(Oz). Montrer que v vérifie l’équation différentielle dv/dt = −
6
phR / m v
+ g −
rhuileV
g / m
.
Sur l'axe Oz, la seconde loi de Newton s'écrit :
m dv/dt = −
6phR v
+m g − rhuileV
g. Puis diviser par m.
En explicitant les valeurs numériques, on admet que v est solution de
l’équation
différentielle (E) suivante où v(t) est exprimée en m·s
-1 et
t en s :
(E) : dv / dt
= −6,8 v + 7,5.
Q4. Au début de
l’expérience, la bille est introduite dans l’éprouvette avec une
vitesse
nulle. Démontrer que la solution v de cette équation sur [0 ; +∞[
vérifiant cette
condition initiale est définie par : v(t) = −
75 /
68 exp(
−6,8 t )+
75 /
68 .
Solution générale de dv /dt +6,8 v = 0 : v(t) = A exp(-6,8t) avec A une
constante.
Solution particulière de (E): v(t) =7,5 /6,8 = 75 / 68.
Solution générale de (E) : v(t) =
A exp(-6,8t) +75 / 68.
v(t=0) = 0, d'où A = -75 /68.
v(t) = −
75 /
68 exp(
−6,8 t )+
75 /
68 .
Q5. Déterminer la valeur
exacte de la limite de v(t) en plus l'infini.
En plus l'infini, le terme en exponentielle tend vers zéro.
v
lim =75 /68 m /s.
Q6. On mesure
expérimentalement une vitesse limite v
lim = 1,1 m /s
.
On peut en déduire la valeur de la viscosité
h par la relation suivante :
h = (m-
rhuile V ) g / (6
pRv
lim).
Calculer cette valeur et comparer le résultat à la valeur
h = 0,66 kg m
-1 s
-1
fournie par
le fabricant.
h =(20,1 10-3-840
x5,6 10-6) x9,81 / (6 x3,14 x0,011x1,1)=0,66 kg m-1 s
-1 .
Aide au stationnement.
Les constructeurs automobiles proposent depuis plusieurs années des
systèmes
d’aide au stationnement ou de stationnement automatique qui reposent
sur l’utilisation
de capteurs à ultrasons.
Quelques caractéristiques
des ultrasons.
Q1. Parmi les
propositions suivantes, indiquer sur votre copie celles qui sont
exactes :
Affirmation A : les ondes ultrasonores sont des ondes
électromagnétiques. Faux.
Affirmation B : les ondes ultrasonores sont des ondes
mécaniques.
Vrai.
Affirmation C : les ondes ultrasonores peuvent se propager dans le
vide. Faux.
Affirmation D : les ondes ultrasonores nécessitent la présence
d’un milieu matériel pour
se propager. Vrai.
Le document 1, représente la tension mesurée à l’oscilloscope par
un détecteur
recevant le signal émis par un émetteur d’ultrasons :
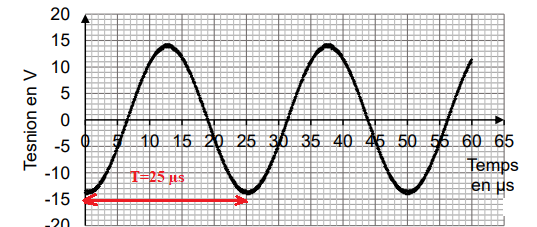 Q2.
Q2. Déterminer la
fréquence f des ultrasons émis, en kHz et expliquer pourquoi le
signal produit par l’émetteur n’est pas audible.
Donnée : les ondes sonores audibles ont des fréquences comprises entre
20Hz et
20 kHz.
f = 1 / T = 1 /(25 10
-6) =40 000 Hz = 40 kHz > 2 kHz non
audible pour l'homme.
Utilisation des ultrasons
pour déterminer une distance.
Le capteur à ultrasons utilisé dans le système d’aide au
stationnement est un capteur
« combiné » qui contient un émetteur et un récepteur d’ondes
ultrasonores. La distance
entre le capteur et l’obstacle est déduite de la durée qui s’écoule
entre l’émission d’une
impulsion ultrasonore et la réception de son écho par le capteur,
connaissant la vitesse
de propagation des ultrasons dans l’air.
Une modélisation au laboratoire du capteur, à l’aide d’un émetteur et
d’un récepteur à
ultrasons indépendants, a permis d’obtenir la copie d’écran
d’oscilloscope suivante
dans le cas d’un obstacle situé à une distance de 10 cm.
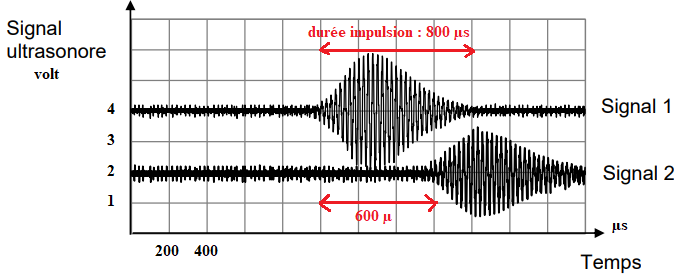 Q3.
Q3. Indiquer, en
donnant deux arguments, lequel des deux signaux (signal 1 ou signal
2) du document 3 est associé à l’onde réfléchie.
L'onde réfléchie (signal 2) est en retard sur l'onde incidente ( signal
1).
Q4. Le capteur
combiné ne peut fonctionner correctement en récepteur que lorsqu’il a
fini de fonctionner en émetteur. Préciser si la durée d’impulsion
utilisée dans l’expérience permettrait de détecter correctement un
obstacle situé à une
distance de 10 cm.
Durée impulsion : 800 µs.
Durée pour parcourir 10 cm à la célérité v = 340 m /s : 0,1 / 340 =294
10
-6 s = 294 µs < durée de l'limpulsion.
La réception s'effectue alors que l'émission n'est pas terminée.
Principe de fonctionnement
d’un système de stationnement automatique. 6 points.
Certains systèmes embarqués effectuent automatiquement la
manœuvre de
stationnement du véhicule, sans intervention du conducteur. Cela n’est
possible
qu’après une phase de mesure qui permet de déterminer si la taille de
la place est
compatible avec la manœuvre.
Dimensions minimales de la place de stationnement : longueur : 5,1 m ;
largeur : 2,2 m.
Lors de la phase de mesure, la voiture est parallèle au trottoir et se
déplace vers l’avant
à vitesse constante le long de la place libre.
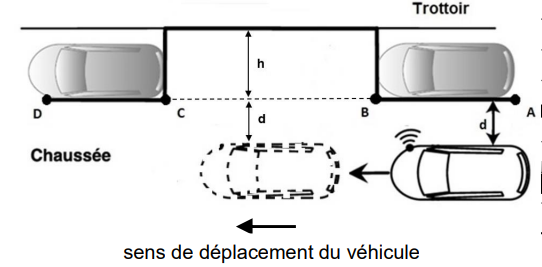
On a réalisé un dispositif modélisant ce système grâce à un
microcontrôleur et un
émetteur-récepteur à ultrasons que l’on a fixé sur une voiture se
déplaçant comme
indiqué sur le document suivant :
 Q5.
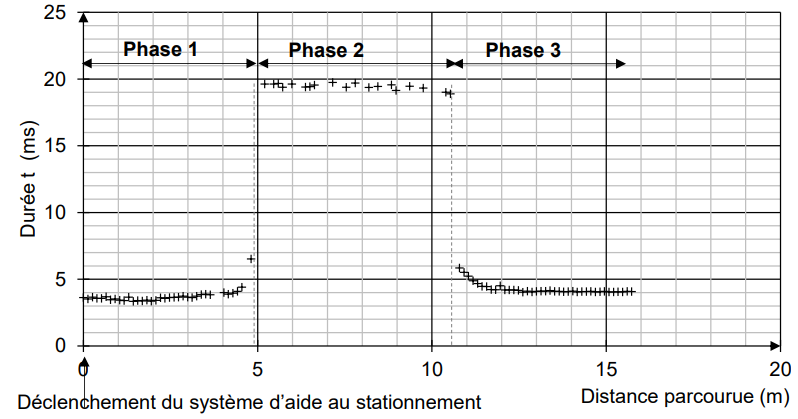
Q5. Durant la phase
2 du mouvement de l’automobile indiquée sur le document, le
capteur à ultrasons se trouve au niveau de la place disponible (entre
les points B et C ). Déterminer la durée de la phase 2 du mouvement de
la
voiture et en déduire la longueur de la place libre. Indiquer si
celle-ci permet le stationnement
de la voiture.
Donnée : la voiture se déplace à la vitesse v
0 = 1,3 m.s
-1
.
Distance
parcourue durant la phase 2 : 5,05 m.
Durée : 5,05 / 1,3 =3,88 s.
La distance d indiquée sur le document 5
désigne la distance latérale par rapport aux
véhicules déjà stationnés.
Q6. Sachant que la
vitesse de propagation
des ondes ultrasonores dans l’air est c = 340 m·s
-1 montrer
que la valeur de la
distance d est comprise entre 0,6 m et 0,7 m.
Calculer la profondeur h de la place libre et
indiquer si celle-ci permet le stationnement de la voiture.
Durée de la phase 1 : t
1=4 ms.
distance aller + distance retour des ultrasons : 2d = c
t1=340 x4 10-3=1,36
m; d = 1,36 / 2 =0,68 m.
Durée
de la phase 2 : t2=16 ms.
distance aller + distance
retour des ultrasons : 2h = c t2=340 x16 10-3=5,44 m; h= 5,44
/2 =2,72 m.
Cette profondeur est suffisante pour garer la voiture.