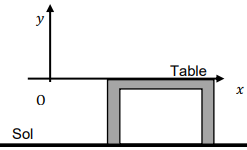
Le « water bottle flip
» est un jeu d’adresse consistant à lancer une bouteille plastique
partiellement remplie
d’eau afin qu’elle se pose verticalement sur sa base sur une table
placée à proximité. Il faut beaucoup
s’entraîner pour réussir un « water bottle flip ». Initialement, la
bouteille n’est tenue que par son col. Le
mouvement ascendant du bras communique la vitesse juste suffisante à la
bouteille. Tandis qu’elle monte
puis redescend, celle-ci tourne sur elle-même.
Dans cet exercice, on se propose d’étudier le mouvement du centre de masse de la bouteille.
Le système considéré est l’ensemble {bouteille + eau} de
masse 𝑚 = 162 g dont on étudie le mouvement du centre
de masse, noté G.
Le système évolue dans le champ de pesanteur terrestre
uniforme.
On fait l’hypothèse que l’action de l’air est négligeable.
Le mouvement est étudié dans le système d’axes (O𝑥𝑦).
À la date 𝑡 = 0 s, le centre de masse G est placé à l’origine du repère O et sa vitesse initiale, notée v
0, a une
direction faisant un angle
a avec l’axe horizontal (O𝑥).
Recherche des conditions initiales sur la vitesse.
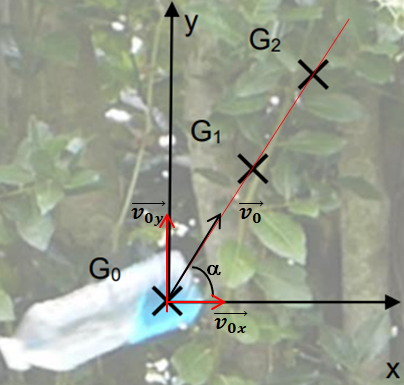
Grâce à la vidéo montrant un lancer réussi, on a pu
pointer la position du centre de masse G à différents
instants.La durée entre deux positions
successives est
t = 40 ms.
L’échelle est donnée par la bouteille dont la hauteur
est 18,8 cm.
1. Représenter sur la copie, sans souci d’échelle, le système d’axes (O𝑥𝑦), le vecteur v
0, l’angle
a ainsi
que les coordonnées v
0x et v
0y et l’allure de la trajectoire du centre de masse de la bouteille.
2. À partir des données expérimentales fournies et de la figure, vérifier que la valeur expérimentale v
0
du vecteur vitesse initiale est proche de 3,6 m ⋅ s
−1
.
G
0G
1 ~18,8 x 3,8 / 5 ~14,3 cm.
v
0 ~0,143 / 0,040 ~3,6 m s
-1.
3. Proposer une méthode permettant de déterminer expérimentalement la valeur de l’angle
a.
Projection de G
1 sur Ox :2 cm.
Projection de G1 sur Oy :3 cm.
tan a = 3 / 2 =1,5 ; a ~56°.
Modélisation du déplacement du centre de masse.
4. En précisant la loi utilisée, donner les expressions des coordonnées du vecteur accélération a du
centre de masse.
La bouteille n'est soumise qu'à son poids verticale vers le bas, valeur mg.
La seconde loi de Newton conduit à : a
x = 0 et a
y = -g.
5. En déduire les expressions des coordonnées v
x(𝑡) et v
y(t) du vecteur vitesse du centre de masse et
montrer que les équations horaires du mouvement sont :
x(t)= v
0 cos
a t ; y(t)=-½gt
2 +
v0 sin a t
.
Le vecteur vitesse est une primitive du vecteur accélération et v
0x =
v0 cos a , v0y = v0 sin a .
vx = v0 cos a , v0y =-gt + v0 sin a .
Le vecteur position est une primitive du vecteur vitesse et la position initiale est l'origine du repère.
x(t)= v0 cos a t ; y(t)=-½gt2 + v0 sin a t
.
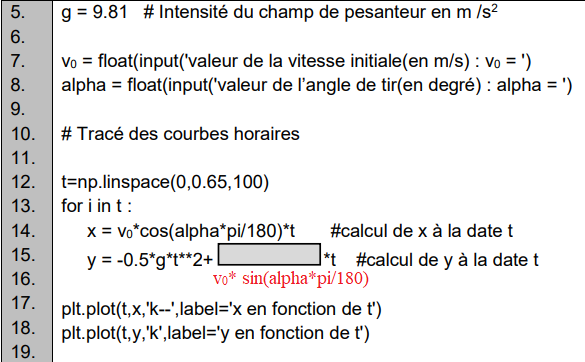
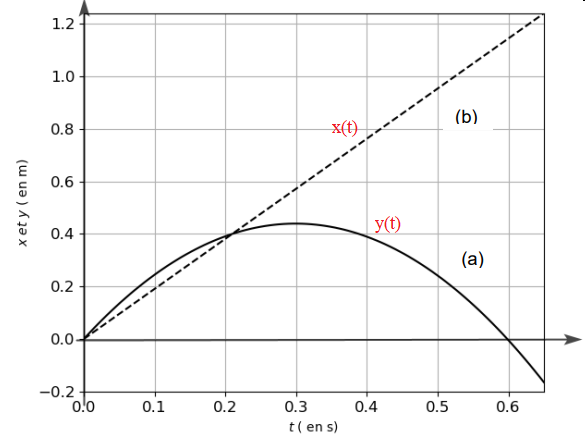
Pour déterminer la distance à laquelle tombe la bouteille par rapport au point O, on crée un programme en
langage python dont un extrait est présenté ci-dessous. Ce programme utilise les équations horaires
modélisant le déplacement du centre de masse et les valeurs expérimentales : v
0 = 3,6 m ⋅ s
−1
𝛼 = 59 ° 𝑔 = 9,81 m ⋅ s
−2 .
.