PARTIE A : étude du besoin et choix
de la matière plastique
Dans l’entreprise, chaque nouveau marché s’accompagne de recherches sur
le domaine d’application du produit afin d’être le plus performant lors
de la conception de celui-ci.
Le responsable du projet veut ainsi comprendre le fonctionnement de la
scintigraphie osseuse. En effet, il ne connaît pas précisément la
différence entre toutes les sortes d’imageries médicales (la radiologie
qui utilise les rayons X, la scintigraphie qui utilise les rayons gamma
etc.) et il veut savoir quel produit va contenir la seringue.
A.1 Qu’est-ce
qu’une scintigraphie ?
Données utiles pour cette partie :
constante de Planck h = 6,63.10
-34 J.s ; célérité de la
lumière dans le vide c = 3,00.10
8 m.s
-1.
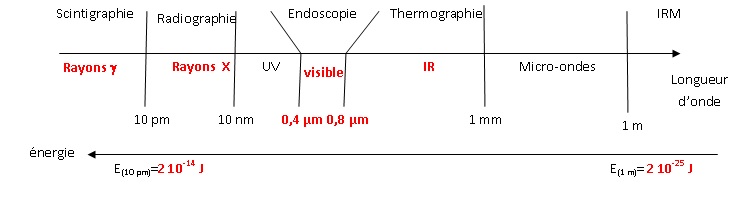
A.1.1 Placer les
domaines du visible, des rayons X, des infrarouges et des rayons gamma
ainsi que les longueurs d’ondes manquantes sur le document.
A.1.2 Calculer les
énergies correspondantes aux graduations extrêmes (10 pm et 1 m) et les
écrire, sous forme scientifique, sur l’axe du document.
E = h c /
l = 6,63
10
-34 x 3 10
8 / (10
-11)=1,99 10
-14
J.
A.1.3 Orienter cet
axe (document réponse 1 à rendre avec la copie) dans le sens des
énergies croissantes.
 A.1.4
A.1.4 Expliquer
alors pourquoi les patients ne doivent pas être exposés trop longtemps
aux rayonnements gamma.
Les rayons gammas sont ionisants ; ils provoquent des dégats sur les
cellules vivantes. ( Brûlures, cancers, mutations génétiques )
A.1.5 Donner deux
arguments qui justifient que le technétium 99m est le marqueur le plus
utilisé en scintigraphie.
- émission d’énergie proche du pic de sensibilité des caméras ;
-durée de demi-vie suffisamment courte pour ne pas irradier trop
longtemps le patient (mais assez longue pour effectuer l’examen).
A.2 Le radioélément
Pour la scintigraphie osseuse, on utilise souvent le "technétium 99m"
qui est un produit radioactif issu de la désintégration du "molybdène
99". On s'intéresse dans cette partie à l'obtention du "technétium 99"
par désintégration radioactive.
Pour information : le "technétium 99m" est un état excité du
"technétium 99".
A.2.1 Citer les
deux types de radioactivité autres que celles indiquées sur le document
A4. Vous préciserez la nature des particules émises lors de ces
rayonnements.
Radioactivité de type alpha : émission d'un noyau d'hélium.
Radioactivité de type béta plus : émission d'un positon.
A.2.2 Dans la
nature, on trouve différents types de molybdène autres que le
"molybdène 99" notés
9242Mo ,
9442Mo , 9542Mo . Comment
nomme-t-on ces différents types d'atomes de molybdène ?
Ces noyaux ne différant que par leurs nombres de neutrons sont isotopes.
A.2.3 Écrire
l’équation de la désintégration du "molybdène 99" (
9942Mo
) en "technétium 99m" (
9943Tc).
9942Mo --->
9943Tc* +0-1e.
A.2.4 Compléter
l’équation de désexcitation par radioactivité gamma du technétium
99m (l’étoile * sur le symbole du technétium correspond à l’état
excité).
9943Tc* ---> 9943Tc +00g.
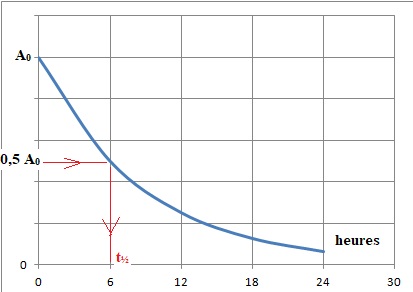
A.2.5 Expliquer ce
qu’est une durée de demi-vie t
1/2 et placer la sur le
graphique d’activité radioactive en expliquant votre démarche.
La durée de demi-vie est la durée au bout de laquelle l'activité
initiale est divisée par deux.
 A.2.6
A.2.6 Expliquer
pourquoi il est possible d'éliminer le "technétium 99m" en local (dans
le centre
de scintigraphie) au bout de 2,5 jours.
2,5 jours = 2,5 x24 h = 60 h soit 10 demi-vies.
Au bout de 10 demi-vies, l'activité résiduelle est très faible.
.