Etude d'un
sondeur. Bac S Polynésie 2015
En poursuivant votre navigation sur ce site, vous acceptez l’utilisation de Cookies vous proposant des publicités adaptées à vos centres d’intérêts.
|
|
|
|
|
|
|
Les
sondeurs sont des appareils de détection sous-marine utilisés au
quotidien par les plaisanciers et les pêcheurs. Ils permettent par
exemple de localiser un poisson en représentant sur un écran sa
profondeur sous l’eau.
L’appareil est relié à une sonde supposée placée à la surface de l’eau
qui envoie des impulsions ultrasonores dans l’eau en forme de cône avec
une intensité maximale à la verticale de la sonde. Le signal réfléchi
par le poisson appelé écho est capté par la sonde puis analysé par
l’appareil en mesurant par exemple la durée entre l’émission et la
réception ainsi que l’intensité de l’écho.
Le sondeur étudié dans cet exercice est embarqué dans un bateau immobile par rapport au fond marin.
Données :
salinité de l’eau : S = 35 ‰ (pour mille) ; température de l’eau : q = 10°C ;
fréquence de l’onde ultrasonore du sondeur : f = 83 kHz ;
ordre de grandeur de la taille d’une sardine adulte : 10 cm ;
ordre de grandeur de la taille d’un thon adulte : 1 m.
La vitesse de propagation vson du son dans l’eau varie en
fonction de plusieurs paramètres du milieu : température, salinité S
(masse de sels dissous dans un kilogramme d’eau, exprimée ici en ‰) et
pression c'est-à-dire la profondeur. Pour de faibles profondeurs, nous
pouvons utiliser le modèle de Lovett suivant :
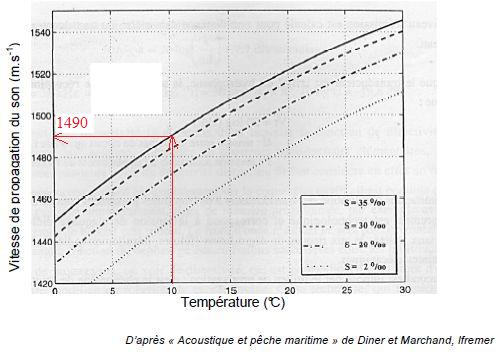
Après avoir justifié l’importance d’un capteur de température dans un
sondeur, déterminer la valeur de la vitesse de propagation du son dans
l’eau pour le sondeur parmi les valeurs suivantes :
1470 m.s-1 ; 1525 m.s-1 ; 1490 m.s-1.
La vitesse du son dans
l'eau varie d'environ 7 %( (1550-1450 ) / 1500 ~0,07) lorsque la
températrure passe de 0 à 30°C. La distance entre le sondeur et le fond
marin dépend de la vitesse de propagation des ultrasons, donc de la
température de l'eau. Il est indispensable de connaître la température
de l'eau en utilisant un capteur de température.
|
| .
. |
|
|
Déduire,
en justifiant la réponse, si le sondeur étudié sera plus performant
pour détecter un thon ou pour détecter une sardine, tous deux supposés
à la même distance et perpendiculaires à la verticale de la sonde.
l = vson / f = 1490 / 83000 ~0,018 m ~1,8 cm.
La taille de la sardine
est de l'ordre de grandeur de la longueur d'onde : les ultrasons seront
diffractés par le petit poisson ( le signal réfléchi se disperse). Par
contre le thon, de grande taille, ne diffracte pas les ultrasons.( le
signal réfléchi est directionnel).
Le sondeur utilisé est plus performant pour les gros poissons.
Déterminer la valeur de la profondeur d à laquelle est situé le poisson si la durée Dt mesurée par le sondeur entre l’émission du signal et la réception de l’écho après réflexion sur un poisson est égale à 32 ms.
2d = vson Dt ; d = 0,5 *1490*32 10-3 ~24 m.
|
.
|
|
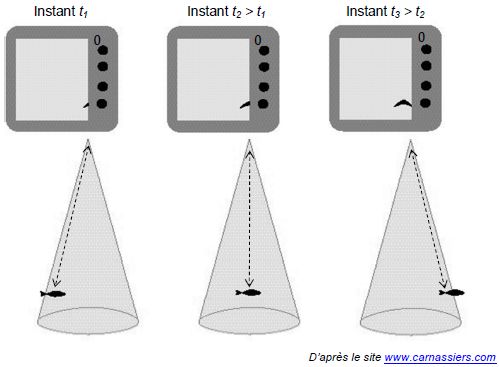
Le
schéma ci-dessous transcrit l’image donnée à l’écran du sondeur pour
trois dates successives lorsque le poisson étudié traverse à vitesse
horizontale constante le
cône de détection. Chaque fois qu’une nouvelle mesure est effectuée par
le sondeur, les anciennes se déplacent horizontalement vers la gauche
sur l’écran, ce qui donne une impression de défilement.
Les dimensions mesurées verticalement sur l’écran sont proportionnelles
aux distances réelles. Le niveau 0 (surface de l’eau) correspond au
haut de l’écran.
On considèrera que la taille du poisson est négligeable devant la profondeur mesurée.
Lors de la réflexion sur un obstacle en mouvement, la fréquence de
l’onde réfléchie est différente de celle de l’onde incidente de
fréquence f.
La valeur absolue de la variation de fréquence |Df| est donnée par : |Df| =2v cos a / c f.
avec : - v, la vitesse de déplacement de l’obstacle par rapport à la source ;
- c, la vitesse de propagation de l’onde ;
- a, angle entre la direction de déplacement de l’obstacle et celle de propagation de l’onde entre l’obstacle et l’observateur.
Justifier
la forme en « accent circonflexe » du signal observé sur l’écran du
sondeur quand le poisson traverse horizontalement à vitesse constante
le cône de détection du sondeur.
Quand le poisson entre (
ou sort ) dans le cône du sondeur, il se trouve plus loin de la sonde :
l'écho est plus faible. Cela se traduit par un trait mince.
Quand le poisson se rapproche de la verticale de la sonde, la distance diminue, l'echo s'intensifie et le trait s'épaissit.
Quelle plage de mesure permet de déterminer la position du poisson avec la meilleure précision ? Justifier la réponse.
La plage de mesure verticale du sondeur (profondeur) : de 0 à pmax = - 50 m donne une plus grande précision pour déterminer la position d'un poisson situé à une profondeur de 24 m. La définition de l’image est de 160
pixels verticaux avec une incertitude sur la définition de l’image de1
pixel. Soit 160 /50 ~ 3 pixels par mêtre. ( au lieu de 3 pixels pour deux mètres avec l'autre gamme de mesure).
À
quel(s) instant(s) une mesure basée sur l’effet Doppler
permettra-t-elle d’évaluer la vitesse de déplacement du poisson ?
Justifier la réponse.
L'angle a n'est connu ( c'est une donnée constructeur ) qu'aux instants t1 et t3, entrée et sortie du cône. La vitesse du poisson sera évaluée à la date t1 ou à la date t3.
|
|