Physique
chimie, positionnement d'un navire par GPS, concours général 2020.
En
poursuivant votre navigation sur ce site, vous acceptez l’utilisation
de Cookies vous proposant des publicités adaptées à vos centres
d’intérêts.
..
..
|
.
.
|
..
..
......
...
|
Le
principe du positionnement GPS repose sur la mesure de la distance
entre le récepteur GPS et plusieurs satellites émetteurs. La distance
est calculée à partir du temps mis par un signal porté par une onde
électromagnétique pour parcourir cette distance. La position de chaque
satellite dans l'espace et l'heure exacte de transmission du message
sont connues avec une grande précision par le récepteur.
1. les satellites constituant le système GPS émettent leurs signaux à des fréquences f1 et f2, ayant pour valeurs respectives f1 = 1575,42 MHz et f2
= 1227,60 MHz. Citer le domaine du spectre électromagnétique dans
lequel se situent ces deux fréquences. Calculer les longueurs
d'onde dans le vide correspondantes.
Les
satellites du système GPS émettent des signaux codés sous forme d'ondes
radio émises.
l = c / f avec f : fréquence en Hz ; c, célérité en m/s, l : longueur d'onde en m.
Pour f = 1,57542 109 Hz : l1 = 3,00 108 / (1,57542 109 )=0,1904 m soit l1 = 0,190 m.
Pour f = 1,2276 109 Hz : l2 = 3,00 108 / (1,2276 109 )= 0,244 m.
2. P Correia écrit
: " Lle principal problème consiste à mesurer le délai avec une grande
précision, lorsqu'on sait qu'une erreur d'un millionième de seconde
provoque une erreur de 300 m sur la position".
Commenter de manière raisonnée cette affirmation.
Erreur sur la position : c Dt =3,00108 x 1,010-6 = 300 m.
3. Les satellites
sont situés sur une orbite quasi-circulaire à une altitude de 20200 km.
La période de révolution est de 11 h 58 min 2 s. Calculer la vitesse
moyenne du satellite sur cette orbite.
Circonférence : 2 p (Rterre +altitude) =2 *3,14 ( 6400 +20200)=1,67 105 km.
Période de révolution : 11 *3600 +58 *60 +2 = 4,3082 104 s.
Vitesse moyenne : 1,67 105 / (4,3082 104 )=3,876 ~3,9 km / s.
L'horloge
embarquée dans le satellite subit les effets de la relativité
restreinte et en particulier la dilatation des temps. Les horloges
atomiques des satellites, en mouvement à grande vitesse autour de la
terre, battent plus lentement que celles restées immobiles au sol. A
partir du lancement du satellite, un décalage s'installe au fil des
jours entre le temps Tréf mesiuré à bord du satellite et le temps T0 mesuré sur terre : les horloges placées au sol et dans le satellite se désynchronisent.
On appelle DTréf
la correction relativiste à apporter sur le temps de parcours du signal
entre le satellite et le récepteur à la surface de la terre et T0 le temps écoulé depuis la synchronisation entre l'horloge placée dans le satellite et celle restée au niveau du sol.
DTréf = 0,5 v2 T0 / c2.
4.
Le premier satellite a été lancé le 23 / 12 /2018. les horloges sont
synchronisées au moment du lancement. On repère la position d'un objet
placé à la surface de la terre par GPS à la date du 11 / 3 / 2020.
Calculer la correction relativiste à apporter sur le temps de parcours
du signal entre le satellite et le récepteur terrestre et estimer s'il
y a lieu de tenir compte de cette correction.
T0 ~453 jours soit environ 3,9 107 s.
DTréf = 0,5 (3,9103)2 *3,9 107 / (3,00 108)2~3,3 10-3 s.
Une
erreur d'un millionième de seconde provoque une erreur de 300 m sur la
position". Il faut prendre en compte la correction relativiste.
|
...
|
....
|
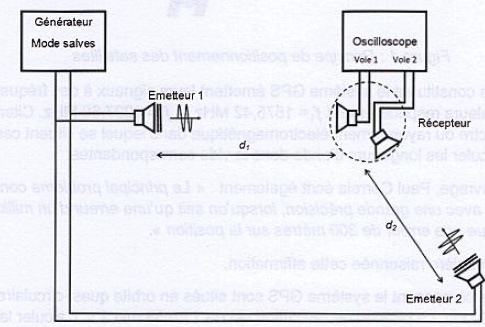
Expérience de modèlisation de GPS.
Des élèves souhaitent construire une maquette simplifiée de GPS. Ils
utilisent deux émetteurs ultrasonores ( représentant les
satellites ) et deux récepteurs ultrasonores fixés sur l'objet dont on
veut repérer la position. Ces deux récepteurs sont reliés à un système
d'acquisition. les deux récepteurs modèlisent le récepteur GPS.
Les deux émetteurs sont alimentés par le même générateur de salves et envoient au même instant t0
une impulsion ultrasonore de durée 5 ms en direction des récepteurs.
L'atgténuation est négligeable sur la distance parcourue. La vitesse de
propagation des ondes est c=340 m /s.
5. Donner la gamme de fréquences des ondes ultrasonres. Décrire leur nature.
Ce sont des ondes mécaniques longitudinales dont les fréquences vont de 20 kHz à 10 MHz.
6. Estimer le nombre de périodes constituant la salve émise.
Pour une fréquence f = 20 kHz = 2,0 104 Hz ; période T = 1 /(2,0 104) =5 10-5 s = 0,05 ms.
Nombre de périodes par salves : 5 / 0,05 = 100.
Les récepteurs sont constitués d'un capteur et d'un conformateur
électronique qui délivrent un signal binaire : - 1 V en absence de
réception et +1 V en présence d'une onde reçue.
7. Les signaux suivants sont observés sur l'oscilloscope. La date t0
= 0 correspond à l'émission simultanée du signal par les deux
émetteurs. Montrer que la distance entre l'émetteur 1 et le récepteur
est d1 = c (t1-t0). En déduire l'expression de d2. Les calculer.
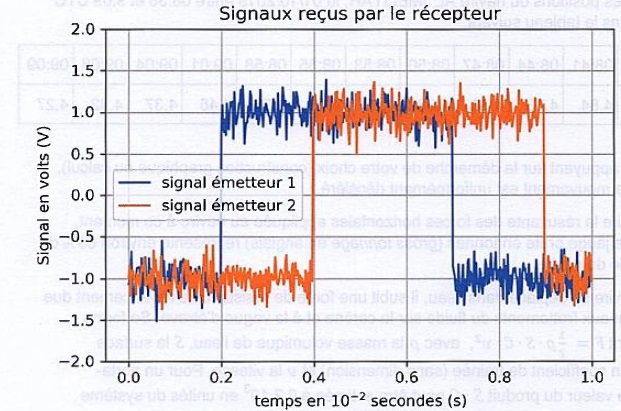
Durée du parcours d1 : retard du signal reçu = t1-t0 =0,2 10-2 = 2 10-3 s.
Célérité des ondes : c = 340 m /s.
d1 = 340 * 2 10-3 =0,68 m.
Durée du parcours d2 :retard du signal reçu = t2-t0 =0,4 10-2 = 4 10-3 s.
d2 = 340 * 4 10-3 =1,36 m.
8. Représenter l'ensemble des positions compatibles avec d1 et d2.
Déterminer la position du récepteur. Expliquer quelle modifications il
faudrait apporter à la maquette pour déterminer, parmi les positions
possibles, celle du récepteur.
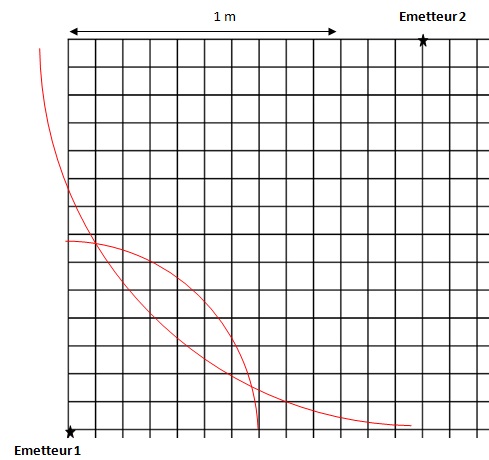
Deux positions du récepteur sont possibles.
9. En généralisant
à trois dimensions, déterminer le nombre minimum de satellites
permettant de déterminer la position d'un récepteur GPS.
10. Expliquer l'intérêt d'avoir un nombre de satellites plus grand que le minimum nécessaire.
Le
principe d'une mesure est le suivant : un utilisateur détermine sa
distance à un premier satellite. Il peut alors affirmer qu'il se trouve
sur la surface d'une sphère de rayon égal à cette distance et centrée
sur ce satellite. L'utilisateur détermine ensuite sa distance à un
deuxième satellite, ce qui lui permet de déduire qu'il se trouve à
l'intersection de deux sphères, c'est à dire sur un cercle.
Enfin
, la détermination de sa distance à un troisième satellite place
l'utilisateur sur une troisième sphère, ce qui réduit ses positions
possibles à deux points, l'utilisateur peut soit effectuer une
quatrième mesure, soit rejeter le point dont l'altitude est aberrante.
Pour la science n°320, juin 2004.
|
|