Traversée de
l'Atlantique à la voile.
Bac Sti2d métropole 2016.
En poursuivant votre navigation sur ce site, vous acceptez l’utilisation de Cookies vous proposant des publicités adaptées à vos centres d’intérêts.
|
|
|
|
|
|
|
|
PARTIE 1 : Utilisation d’un récepteur GPS pour se repérer en mer.
La célérité des ondes émises par les satellites au cours de leur trajet est c = 3,00 108 m s–1.
1.1. Le système GPS.
1.1.1. Donner la relation liant la fréquence f, la longueur d’onde (dans le vide) l et la célérité c d’une onde électromagnétique.
l = c / f.
Les fréquences des ondes électromagnétiques utilisées dans le système GPS sont :
f1 = 1575,42 MHz ; f2 = 1227,60 MHz.
1.1.2. En déduire dans quel domaine se situent les ondes utilisées dans un système GPS.
l1 = 3,00 108 / (1575,42 106)=0,190 m.
l2 = 3,00 108 / (1227,60 106)=0,244 m.
Ces ondes appartiennent au domaine des ondes radio.
1.1.3. Expliquer pourquoi il n’est pas envisageable d’utiliser des ondes sonores à la place des ondes électromagnétiques.
Les satellites du système GPS se situent au delà de l'atmosphère terrestre.
Les ondes sonores sont des ondes mécaniques qui ne se propagent pas dans le vide.
1.2. La précision du GPS.
L’onde émise par le satellite GPS se propage jusqu’au récepteur
embarqué dans le bateau. La durée des trajets entre différents
satellites et le récepteur doit être mesurée avec une grande précision.
À partir de ces mesures, on peut estimer la position du bateau mais il
faut tenir compte
des sources d’erreur.
Pour bénéficier d’une précision de l’ordre de 10 m dans le positionnement, il faut tenir compte :
- des erreurs de positionnement des satellites,
- des erreurs de synchronisation : imprécision sur la mesure de durée du parcours des ondes,
- des erreurs liées à la modification de la direction de propagation de l’onde dans l’ionosphère
1.2.1. Expliquer en quelques mots pourquoi le récepteur doit capter les ondes émises par le maximum de satellites.
Avec un seul satellite :
La durée du trajet bateau-satellite permet déterminer la distance entre le satellite et le GPS.
Le bateau se trouvera à la surface de la mer en un point quelconque d'un cercle.
Avec deux satellites : la position du bateau sera à l'intersection de deux cercles.
Le GPS doit recevoir un grand nombre de signaux de plusieurs satellites pour une localisation précise.
1.2.2.Indiquer à
quel phénomène physique s’apparente la modification de la direction de
propagation des ondes à la traversée de l’ionosphère.
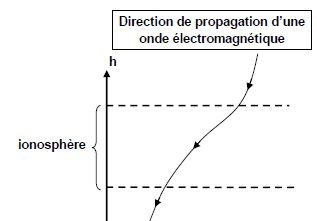
Réfraction de la lumière à travers une lame à faces parallèles.
1.3. La vitesse du bateau.
La vitesse du bateau peut être déterminée par effet Doppler : lorsque
le satellite et le bateau se rapprochent, la période temporelle du
signal reçu est inférieure à celle de la source et inversement.
La fréquence freçue du signal reçu par le récepteur est inférieure de 31,5 kHz à celle de la fréquence
f1 émise par le satellite. Indiquer si le satellite et le
bateau s’éloignent ou se rapprochent l’un de l’autre. Justifier la
réponse.
Lorsque
le satellite et le bateau s'éloignent, la période temporelle du signal
reçu est supérieure à celle de la source. La fréquence est l'inverse de
la période temporelle. Lorsque le satellite et le bateau s'éloignent, la fréquence du signal reçu est inférieure à celle de la source.
|
|
|
PARTIE 2 : Alimentation d’un récepteur GPS par une pile au lithium.
Le système de localisation GPS embarqué sur le bateau doit être
alimenté par une tension élevée. La pile utilisée ici est une pile au
lithium-chlorure de thionyle (Li-SOCℓ2) ou pile LTC.
2.1. Informations sur les piles au lithium.
Expliquer pourquoi le lithium (associé à une électrode de potentiel
positif) est le matériau le mieux adapté à la conception d’une pile
utilisée pour l’alimentation du récepteur GPS.
Le métal lithium est un bon conducteur électrique.
C'est un excellent réducteur, la tension au bornes de la pile sera élevée.
La capacité massique d'une pile au lithium est supérieure à celle des autres piles.
La masse volumique du lithium étant faible, la masse de la pile sera plus faible que celle des autres piles.
2.2. Fonctionnement d'une pile au lithium.
La pile LTC utilisée ici est constituée :
- d’une électrode de lithium métal,
- d’une électrode constituée de carbone poreux rempli de chlorure de thionyle (SOCℓ2) et de tétrachloroaluminate de lithium LiAℓCℓ4 (avec [Li+] = 0,010 mol L-1.
2.2.1. L’électrode de lithium présente un potentiel ELi = - 3,16 V (à 25 °C). Écrire la demi-équation électronique pour le couple Li+/Li. Écrire l’expression littérale du potentiel ELi à l’aide de la relation de Nernst, et retrouver la valeur donnée ci-dessus.
Li(s) = Li+ +e-.
ELi = E°(Li+ /Li) +0,06 log [Li+] = - 3,04 +0,06 log 0,010 = -3,16 V.
Lors du fonctionnement de la pile, l’électrode de carbone est le siège
de la réaction électrochimique dont l’équation est : 2 SOCℓ2 + 4 e- = 4 Cℓ- + SO2 + S.
Dans les conditions d’utilisation de la pile, l’électrode de carbone adopte un potentiel Ec = 0,65 V.
2.2.2. Calculer la force électromotrice de la pile dans ces conditions de fonctionnement.
E = Ec -ELi =0,65+3,16 = 3,81 V.
2.2.3. Écrire l'équation d'oxydoréduction de fonctionnement de la pile.
2 SOCℓ2 + 4 e- = 4 Cℓ- + SO2 + S.
4Li(s) = 4Li+ +4e-.
Ajouter et simplifier : 2 SOCℓ2 + 4 Li(s) = 4 Cℓ- +4Li+ + SO2 + S.
2.2.4. Indiquer quelle électrode constitue l’anode et quelle électrode constitue la cathode. Justifier.
Le lithium, le réducteur, s'oxyde à l'anode ; le chlorure de thionyle, l'oxydant, se réduit à la cathode.
|
|
|
|
2.3. Durée de fonctionnement du récepteur GPS.
Le navigateur estime que sa traversée de l’Atlantique durera au moins
22 jours. Il cherche donc à déterminer l’autonomie des piles au lithium.
On considère que le récepteur GPS est alimenté par une pile contenant une masse m = 1,20 g de lithium métallique.
2.3.1. Le lithium
est le réactif limitant lors du fonctionnement de la pile. En déduire
que la charge électrique ou quantité d'électricité Q débitée par la
pile une fois que tout le lithium aura été consommé vaut Q = 1,68 104 C.
Quantité de matière de lithium : n = m / M(Li) = 1,20 / 6,90 =0,174 mol.
Quantité de matière d'électrons : n = 0,174 mol.
Q = n F = 0,174 *9,65 104 =
1,68 104 C.
2.3.2. Sachant que l'intensité I fournie au récepteur GPS vaut I = 10,00 mA, vérifier qu’il présente une autonomie t = 19,4 jours.
t = Q / I = 1,68 104 / 0,0100 =1,68 106 s ou 19,4 jours.
L’incertitude Ut sur l’autonomie peut être calculée à l’aide de l’expression suivante :
[Ut / t]2 = [Um Li / mLi]2 + [UI / I]2.
2.3.3. Sachant que Um Li / mLi=2,5 10-2 et UI / I = 0,2 10-2, en déduire que l’incertitude sur l’autonomie peut être calculée de façon simplifiée à l’aide de l’expression suivante : Ut / t= Um Li / mLi.
[UI / I]2 = 4 10-6 ; [Um Li / mLi]2 =6,25 10-4, soit 100 fois plus grand que [UI / I]2.
2.3.4. Écrire la valeur de l’autonomie t sous la forme : testimée = t ± U.
Ut / t= 2,5 10-2 ; Ut =2,5 10-2 *19,4 =0,485 ~0,5 jour.
testimée =19,4 ±0,5 jours.
2.3.5. Indiquer si l’autonomie du récepteur GPS parait suffisante. Argumenter la réponse.
La traversée dure 22 jours, l'autonomie de la pile est insuffisante.
De plus, on suppose que tout le lithium est consommé, cela surestime sans doute l'autonomie de cette pile.
PARTIE 3 : Utilisation du pilote automatique.
Lorsque le navigateur active le pilote automatique, le bateau peut être
considéré comme un système régulé, dont le principe simplifié est
décrit . Cette partie a pour objectif la vérification du bon
fonctionnement du capteur d’angle et l’évaluation des performances du
pilote automatique.
3.1. Vérification du capteur d'angle.
Le navigateur trouve que son pilote n'est plus aussi efficace
qu'auparavant. Il pense que le capteur transmetteur d'angle est
déréglé. Pour vérifier son hypothèse il mesure l’intensité du signal
fourni par le capteur-transmetteur. Cette intensité a pour valeur I =
18,0 mA lorsque l’angle a vaut 10 °.
3.1.1. Préciser quel type de filtre pourrait être utilisé pour éliminer les signaux parasites, en justifiant rapidement la réponse.
Les signaux parasites ont des fréquences élevées. Ces signaux peuvent
être éliminés par un filtre passe-bas, laissant passer les basses
fréquences.
3.1.2. Indiquer si les soupçons du navigateur sont justifiés. Expliquer le raisonnement.
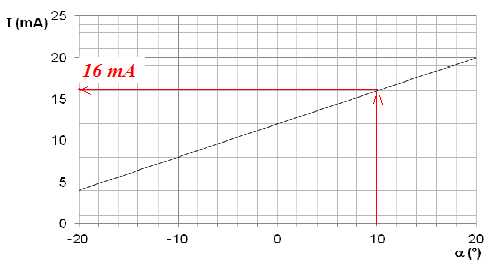
Pourun angle a = 10 °, l'intensité devrait être de 16 mA et non pas 18 mA. Le capteur d'angle est déréglé.
|
3.2. Évaluation des performances du pilote automatique.
Le temps de réponse à 5 % d’un système est la durée mise par la valeur
de la grandeur de sortie pour rester constamment entre 95 % et 105 % de
sa valeur finale.
Un
bateau semblable è celui étudié, navigue sous pilote automatique en
faisant cap au nord ( cap 0°), dans les conditions courantes de
navigation. A t=0, on réalise un brusque changement de cap : on règle
le cap à 40° et on enregistre les mesures du cap suivi jusqu'à
stabilisation.
La grandeur de sortie est l'angle en degré qui peut varirer de : 40*0,95 = 38° à 40*1,05 = 42°.
3.2.1. Déterminer graphiquement le temps de réponse à 5 % du système.
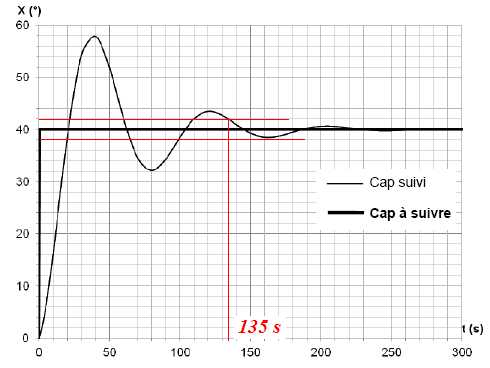
3.2.2. Commenter ce résultat en comparant les performances du pilote automatique à celles d’un navigateur moyennement expérimenté.
Un navigateur moyennement expérimenté peut changer de cap en 2 minutes environ, temps comparable à celui du pilote automatique.
|
|